
介護を受ける人のかゆいところに手が届くロボットシステムを。
中後研究室では、サービス工学の考え方に基づき、ロボット技術を用いた人間支援技術の開発研究を行っています。特に医療・福祉分野や家庭における家事支援分野など、人の生活内におけるサービス提供を実現するためのロボット開発および周辺技術開発を主な研究テーマとして、人の動作計測技術や人の動作モデリング、人との協調動作を可能とするロボット制御技術の開発などに取り組んでいます。

私たちはこんな研究をしています!
親しみやすく、愛着をもって使ってもらえるロボットをデザインするには、どうすべきか?
私は、ロボットのデザインを通して「人とロボットの関係性」を明らかにしようとしています。ロボットの形や色といった見た目の変化によって印象がどのように変わるのか。それを明らかにして、人に愛着をもって使ってもらえるロボットをデザインし、人とロボットを“ つなぐ” ための指標を見出そうとしています。人が本当に求めているモノを考え、「誰かのために」ではなく「みんなのために」研究できるので、モチベーションを高く保てます。
無数にある解を取捨選択し、 使う人の状態にふさわしいロボットを。
人間を対象としたロボットを開発する場合は、工場などのロボットと異なり、使う人それぞれの状態にふさわしいサービスを提供する必要があります。多様なニーズに対応するためには、機械の性能だけではなく、人間の性質を考慮したロボット設計が欠かせません。相手が人間である以上、この設計には無数の解が存在します。その解ごとの良い点、悪い点を想像しながらロボットに実装し、期待通りに動いた時の喜びはひとしおです。

ロボットシステム開発の すべての行程を体験できる。
ユーザーの”かゆいところに手が届く”ロボットシステムを開発するためには、ロボットの設計から始まり、製作、制御システムのプログラミングなどを行わねばなりません。学生のうちにこうした一連の流れを体験したことは、将来ものづくりに携わるとき、貴重な経験として活きてくるでしょう。また、人の体重分布を測定する可搬式フォースプレートなど、各種計測装置も充実しています。

介護福祉ロボットなど 実用性の高い研究に取り組む。
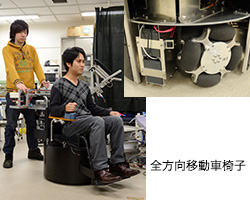
中後研の研究は、実用化を目的としたものが多く、「起立支援機能付リハビリ歩行器」や「全方向移動車椅子」といった介護福祉ロボットは、現場の理学療法士や作業療法士の意見も反映しながら改良を加えています。また人の動作に関する研究は、間接的に、介護従事者の介護スキルの定量評価法の確立や、症状・体格に応じたリハビリ法の自動生成などに役立つと考えられます。
研究のキーワード
サービスによって創造される付加価値を増大させることを目的とした工学。大量生産・大量消費を前提とし、モノの性能のみに着目する従来の工学とは、決定的に異なる。
普通の自動車は、前後の移動は簡単にできるが、横方向の移動はハンドルを切り直すなど大変である。この機構は、前後はもちろん、左右旋回も自由自在に行えるようにするもので、人と一緒に歩くロボットなどには必須の機能。