研究テーマ
モバイルロボット
多体節ロボット:車輪移動型,多脚型,クローラー型,蛇行型等の移動ロボットに比べ,1)転倒がなく,複雑な環境に適応して移動できる,2)移動に必要なスペースが小さく,狭い空間内を移動可能,3)体節が連続的に一列に並ぶ繰返し構造で,故障に強い,という特徴を有する蠕動運動と多足型のハイブリッド機構の多体節ロボット.瓦礫などにおいて人を探索するロボット.
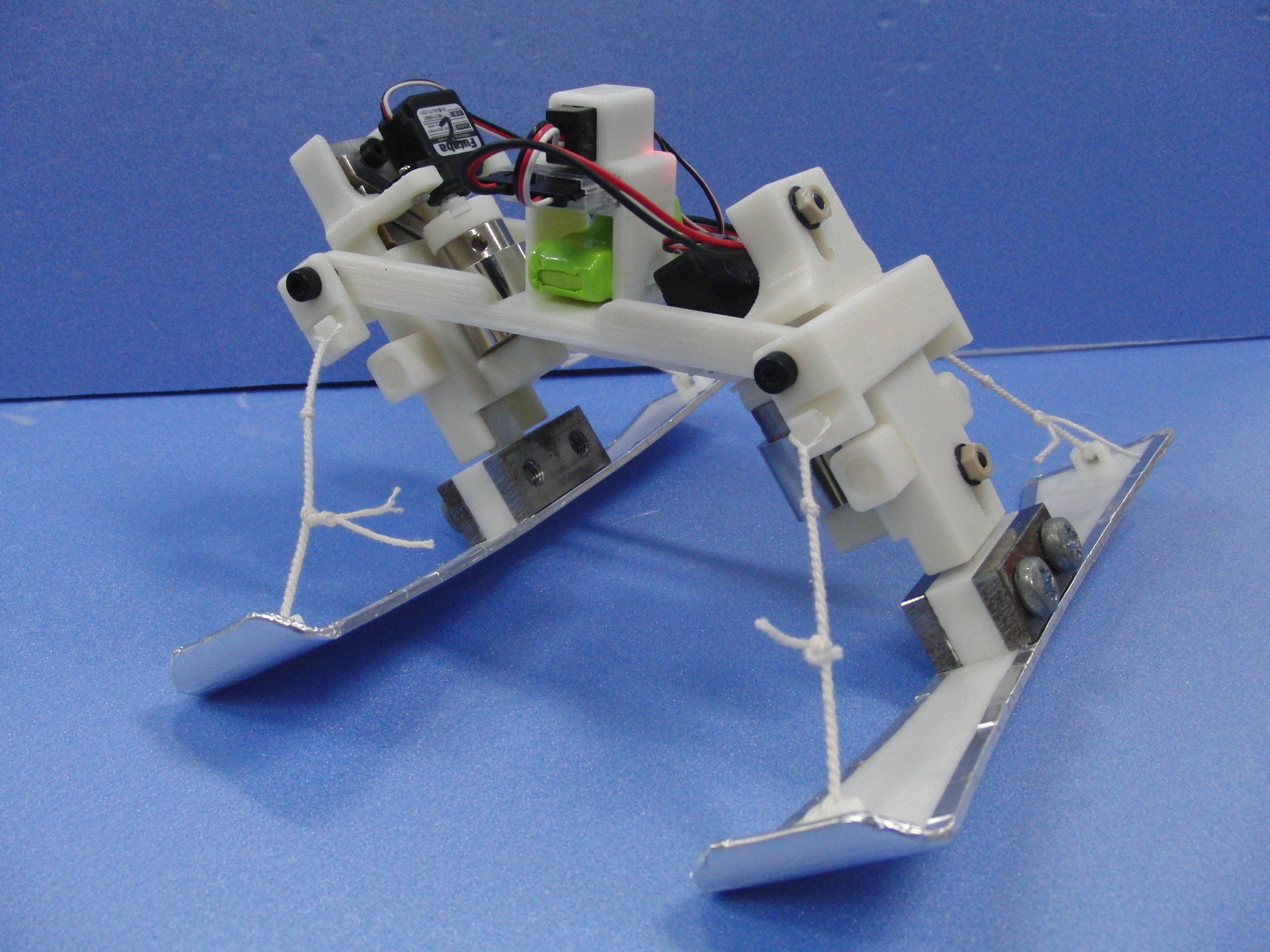
パッシブ・ターン型スキーロボット:重心移動をアルペンスキーヤーの動作を基に受動的に重心移動とスキー板のたわみを利用することで,自動的にターンなターンを実現するロボット.ターンの半径の調整(小回り,大回り)は,ロボットの上下運動に伴う重心移動とカービング・スキー板のたわみを利用して行う.
関連文献
| 1 | Elucidation of Propulsive Force of Micro Robot Using Magnetic Fluid | Journal of Applied Physics, Vol.91 No.10, pp.7003-7005, |
2002.5 |
|---|---|---|---|
| 2 | A Prototype of Peristaltic Robot Using Pneumatic Artificial Muscle | Intelligent Autonomous Systems, IOS Press Vol.8, pp.88-95 | 2004.3 |
| 3 | Development of peristaltic crawling robot using magnetic fluid on the basis of locomotion mechanism of earthworm | Smart Materials and Structures, Institute of Physics Publishing Vol.13, Issue 3, pp.566-569, |
2004.5 |
| 4 | 人工筋アクチュエータを用いた蠕動運動型ロボットの開発 | 計測自動制御学会論文誌,Vol.41, No.12,pp.1013-1018, |
2005.12 |
| 5 | Development of a Peristaltic Crawling Robot Using Planar Link Mechanism | IEEJ Transactions on Electrical and Electronic Engineering,Vol.3, Issue 1, pp.72-78, |
2008.1 |
| 6 | Q-learningと負荷センサを用いた蠕動運動型ロボットに関する研究 | 設計工学, 日本設計工学会,Vol.47,No.3,pp.38-44 | 2012.3 |
| 7 | Design of a peristaltic crawling robot using 3-D link mechanisms | Int. J. Biomechatronics and Biomedical Robotics, Inderscience Enterprises Ltd., Vol. 2, Nos. 2/3/4, pp.111-117, |
2014.1 |
| 8 | Evaluation of earthworm-like movement patterns of many-segmented peristaltic crawling robots | International Journal of Advanced Robotic Systems, SAGE Publications, pp.1-10 |
2016.9-10 |
| 9 | ミミズの筋構造を模した蠕動運動型ロボットの開発 | 日本機械学会論文集,Vol.84, No.861, pp. 17-000548, |
2018.5 |