
生物の身体を動かす仕組みを脳や筋骨格から追究し、人間を支援する技術を開発。
嵯峨研究室では、人間や生物の運動・機構や感覚、学習などを規範にしたロボット技術を研究し、高齢者や障害者などを対象にした介護・福祉機器やレスキューからスポーツ科学に至るまで、人に役立つメカトロニクス機器への応用技術を研究しています。ロボット開発を通し、設計から制作、組立、動作(制御系設計)までを自力で行うことで、企業で即戦力として活躍する能力を身につけられます。

私たちはこんな研究をしています!
「歩行」が困難な方が快適に生活できるよう、リハビリテーション機器の開発に取り組む。
高齢化社会が進んでいる今、日常動作の基本である「歩行」が困難になっている方が数多くいらっしゃいます。そこで嵯峨研では、歩行困難な方のためのリハビリテーション機器の開発や歩行運動の補助を目的に、研究に取り組んでいます。私自身、剣道部に所属していた経験があり、スポーツ科学や人間の動作に興味がありました。その知的好奇心を満たしながら、快適な生活をサポートするリハビリ機器を開発できる。それが、この研究の醍醐味です。
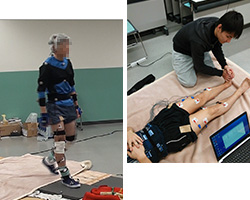
最も基本的な動作である“歩行”のリハビリテーション技術を創生。
“歩行”は、人間が自立した生活を行う上で不可欠な基本動作です。そこで、学内外の研究室と共同で文部科学省 私立大学戦略的研究基盤形成支援事業「歩行における脳活動と筋活動の相関に基づく新しい健康維持促進とリハビリテーション技術の創生」を立ち上げ、学際的な領域から“歩行”にアプローチ。これまであまり着目されていなかった高齢者や膝変形症、足関節拘縮者の歩行動作の解析を行うとともに、膝に負担が少なくて健康を維持・向上させられる歩き方を提案。さらに、伸縮機構を有するアクティブサポーターなどの開発を目指しています。
生物の形や機能に秘められた 意味を読み解き、技術に活かす。
ミミズは体の伸縮を利用して前進運動を行います。「蠕動運動型ロボット」は3つの体節から構成されており、先頭の体節が壁と接触することで体を固定し、後ろの体節を引き寄せることで、ミミズと同じように前進運動ができます。生物の形や機能は、一見単純に見えても有用な意味を持っています。調べていくと、なるほどと納得させられることや未だ解明できないことが多々あり、とても興味深く魅力的な研究対象です。
一からものづくりを体験でき、 研究成果が社会貢献につながる。
一から自分で設計し、組み立てたロボットが、自分で書いたプログラムによって動くという点が、この研究の醍醐味です。そして、研究成果はレスキューや介護の現場で活き、社会貢献にもつながります。病院との共同研究で開発している介護ロボットなどは、医師や療法士の方々に評価していただいたり、患者の方に使用していただいたりして改良を加えながら、より多くの人に安価で提供することをめざしています。

研究のキーワード
ゴムチューブと強化繊維からなる空気圧アクチュエータのこと。生体の筋肉と同じ特徴を持ち、自然長のときに最大の力を発揮する軽量のアクチュエータ。
消化管などの臓器の収縮運動のことで、内容物を搬送する役割をしている。主に食道から直腸までの運動をさす。筋肉の収縮によって生じたくびれが波のように伝播する運動。